
DL Basics


Linear Algebra
Scalars
Vectors
$\mathbb{R^n}$
Matrices
2-D Array
$\mathbb{R^{m\times n}}$
Tensors
Matrix Transpose

$(AB)^T=B^TA^T$
Matrix (Dot) Product
Identity Matrix
$I_nx=x$
Systems of Equations
只有一个解:可逆
Matrix Inversion
可逆必要条件:方阵,满秩
Norms
$||x||_1=\sum_i|x_i|$
$||x||_ \infty =\max\limits_i|x_i|$
Special Matrices and Vectors
正交阵:$A^{-1}=A^T$
Eigendecomposition
每一个实对称矩阵都有实,正交特征分解:
$A=Q \land Q^T$
SVD
不用是方阵
Moore-Penrose Pseudoinverse
???
Trace
Probability and Information Theory
Computing Marginal Probability with Sum Rule
$P(X=x)=\sum_yP(X=x|Y=y)$
$p(x)=\int p(x,y)dy$
Bernoulli Distribution

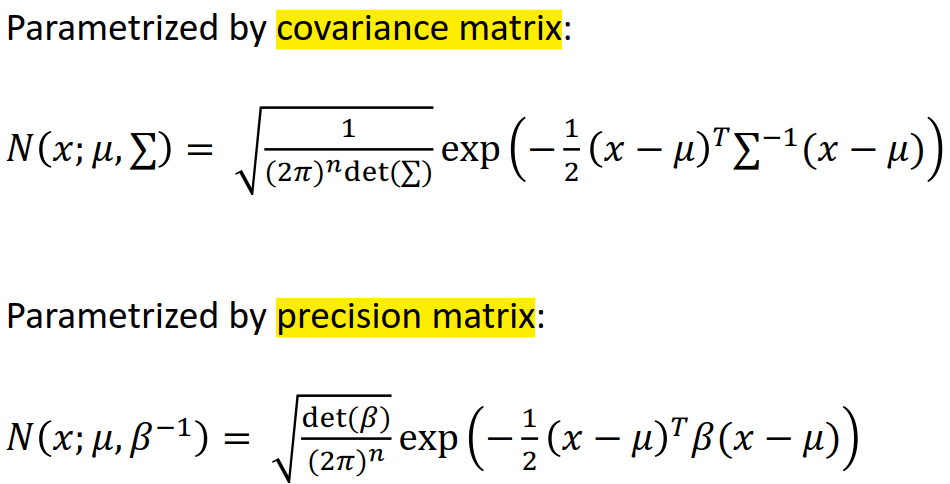
Gaussian Distribution

CNN
特点
Sparse interactions
不是全链接,稀疏链接
Parameter sharing
整张图片共享一个kernel参数矩阵
Equivariant representations
$f(g(x))=g(f(x))$
Images: If we move an object in the image, its representation will move the same amount in the output
Convolution is not equivariant to other operations such as change in scale or rotation
Ability to work with inputs of variable size
Pooling优点
- Pooling helps the representation become slightly invariant to small translations of the input(we care more about whether a certain feature is present rather than exactly where it is)
- Since pooling is used for downsampling, it can be used to handle inputs of varying sizes
Convolution
输出大小:
$\frac{N-K}{S}+1$
$N,原图大小(长或者宽),K,kernel,S,步长$
Zero Padding
$\frac{K-1}{2}\ padding可以保留原来的size$

RNN
LSTM
Challenge of Long-Term Dependencies:梯度消失或爆炸

LSTM可以解决梯度消失(开忘记门),不能解决梯度爆炸
The influence never disappears unless forget gate is closed
No Gradient vanishing (If forget gate is opened.)
Instead of computing new state as a matrix product with the old state, it rather computes the difference between them. Expressivity is the same, but gradients are better behaved.
结构:

GRU结构

Exploding is controlled with gradient clipping. Vanishing is controlled with additive interactions (LSTM)
正则化和优化
Regularization is any modification made to the learning algorithm with an intention to lower the generalization error but not the training error.
经典正则化策略
- Parameter Norm Penalties
L2 norm penalty can be interpreted as a MAP Bayesian
Inference with a Gaussian prior on the weights.
L1 norm penalty can be interpreted as a
MAP Bayesian Inference with a Isotropic Laplace Distribution
prior on the weights.
Dataset Augmentation
Noise Robustness
Noise added to weights
Noise Injection on Outputs. An example is label smoothing.
- Early Stopping
- Parameter Sharing
- Parameter Tying
- Multitask Learning
- Bagging
- Ensemble Models
- Dropout
Dropout can intuitively be explained as forcing the model to learn with missing input and hidden units.
Each time we load an example into a minibatch, we randomly sample a different binary mask to apply to all of the input and hidden units in the network.
- Adversarial Training
training on adversarially perturbed examples from the training set.
优化方法
Gradient Descent
- Batch Gradient Descent
Need to compute gradients over the entire training for one update
- Stochastic Gradient Descent
Minibatching
Use larger mini-batches
Learning Rate Schedule
the learning rate is decayed linearly
Momentum
The Momentum method is a method to accelerate learning using SGD
梯度:


Nesterov Momentum

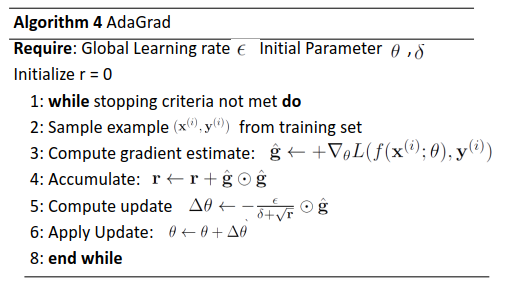
AdaGrad
RMSProp

Adam

以上方法比较

- Batch Normalization
Let H be a design matrix having activations in any layer for m examples in the mini-batch


优点
- Improves gradient flow through the network.
- Allows higher learning rates.
- Reduces the strong dependence on initialization.
- Acts as a form of regularization in a funny way, and slightly reduces the need for dropout.
- Initialization Strategies
Initialization should break symmetry (quiz!)

Reinforcement Learning

Model-free learning
- Policy-based Approach Learning an Actor
- Step1: Neural Network as Actor
Input of neural network: the observation of machine represented as a vector or a matrix
Output neural network : each action corresponds to a
neuron in output layer
- Step 2: goodness of function
Given an actor $𝜋_𝜃 𝑠$ with network parameter $𝜃$

- Step 3: pick the best function
Policy Gradient



- Value-based Approach Learning a Critic
A critic does not determine the action.
Given an actor π, it evaluates the how good the actor is
Critic

Monte-Carlo based approach
The critic watches 𝜋 playing the game
MC VS. TD


Q-Learning

- Deep Reinforcement Learning Actor-Critic

Model-based learning

Advantages of Model-Based RL
